Eklavya '25?
Let's take a look
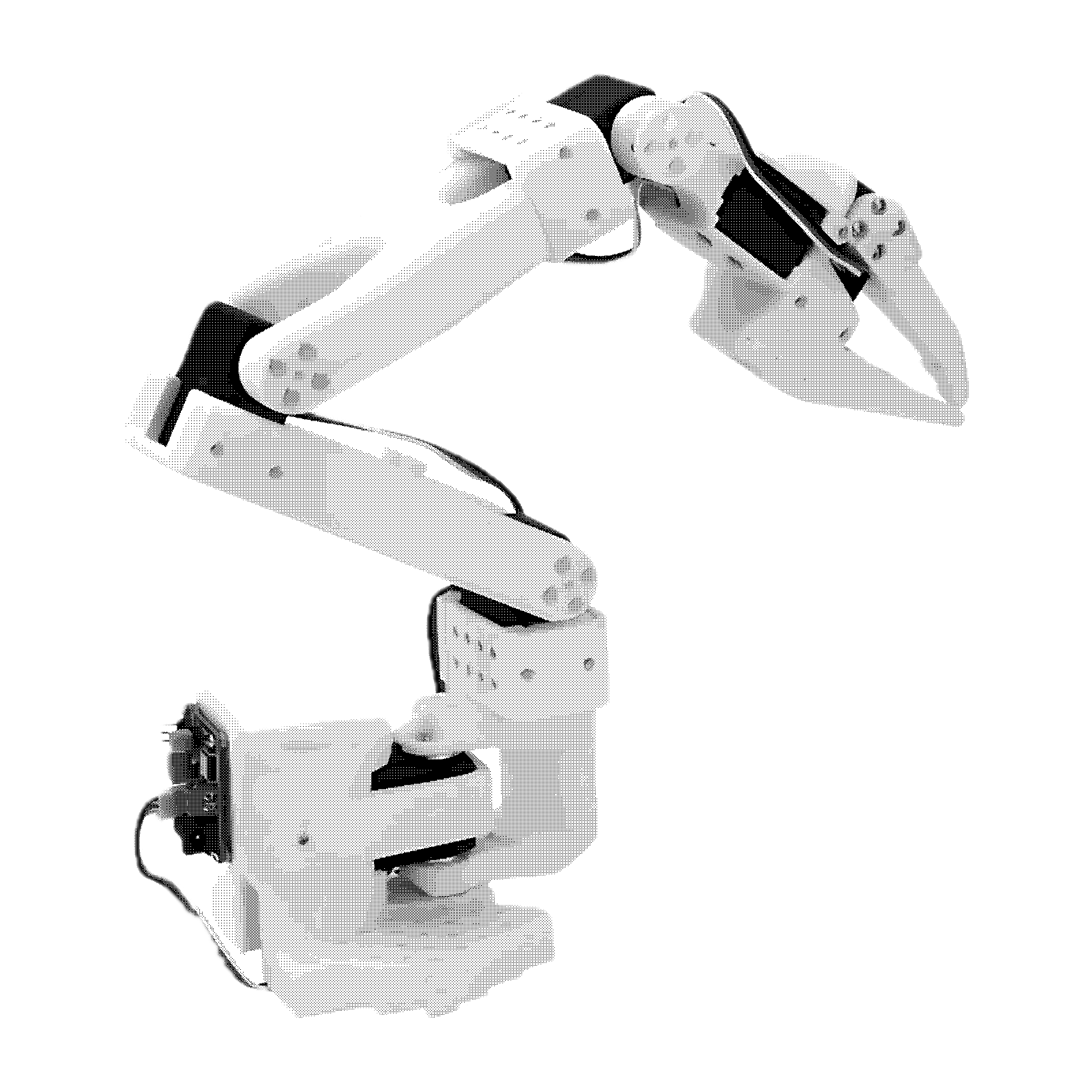
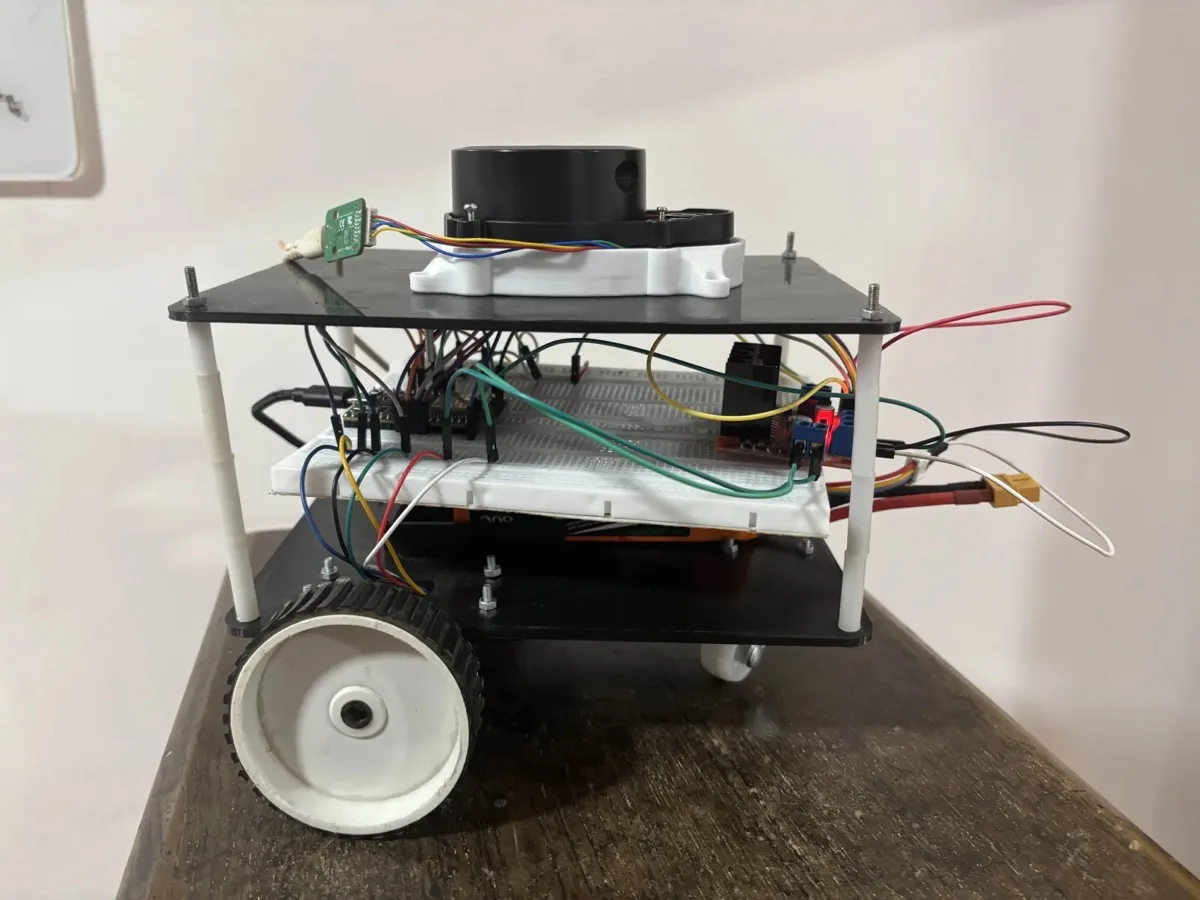
First up we have AutoPort
A ROS2 powered robot for autonomous exploration, mapping and navigation using SLAM

Next comes CustomBoot32
A custom PCB which integrates both STM32 and ESP32 microcontrollers for OTA updates via a server hosted on the PCB
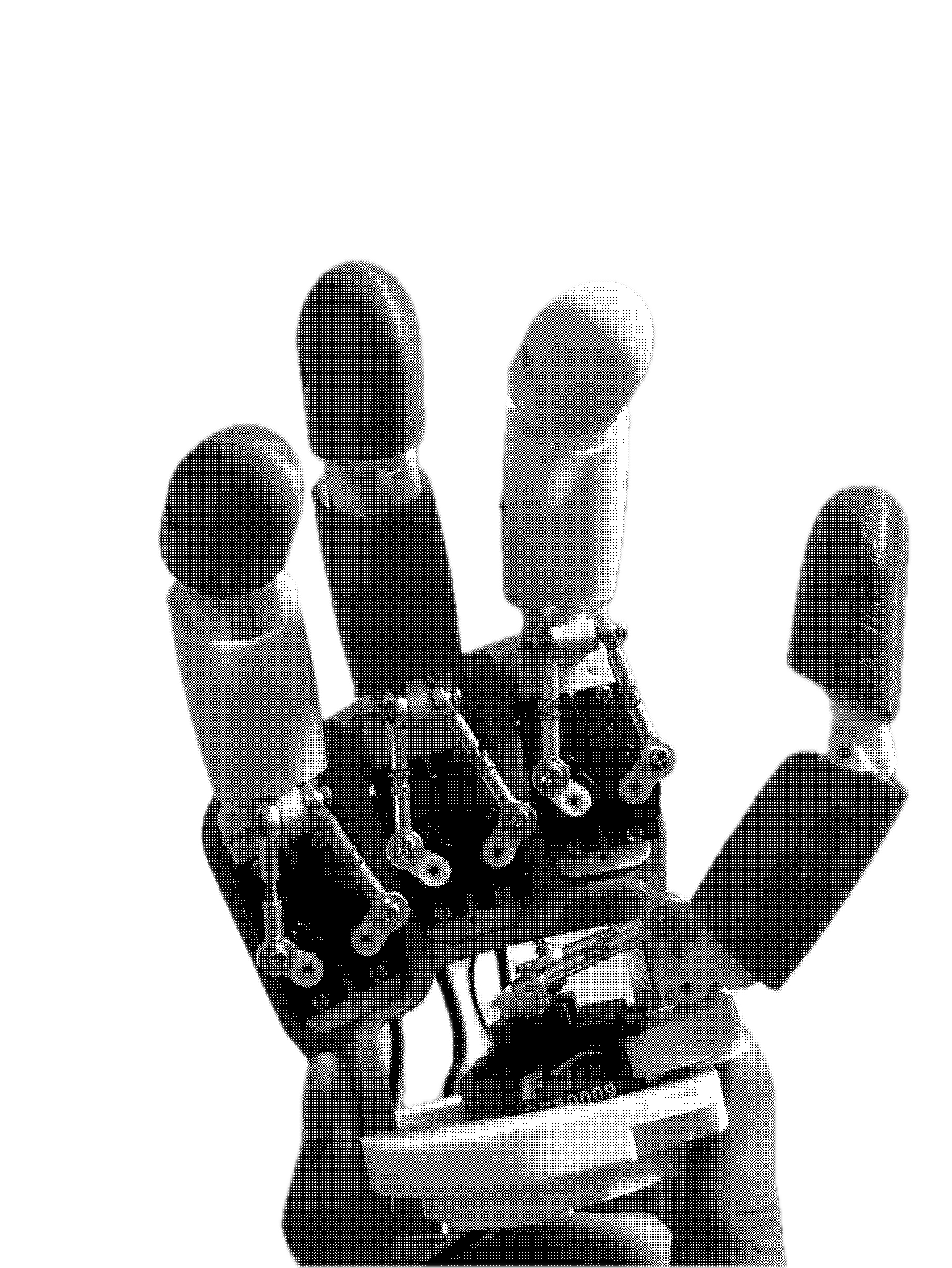
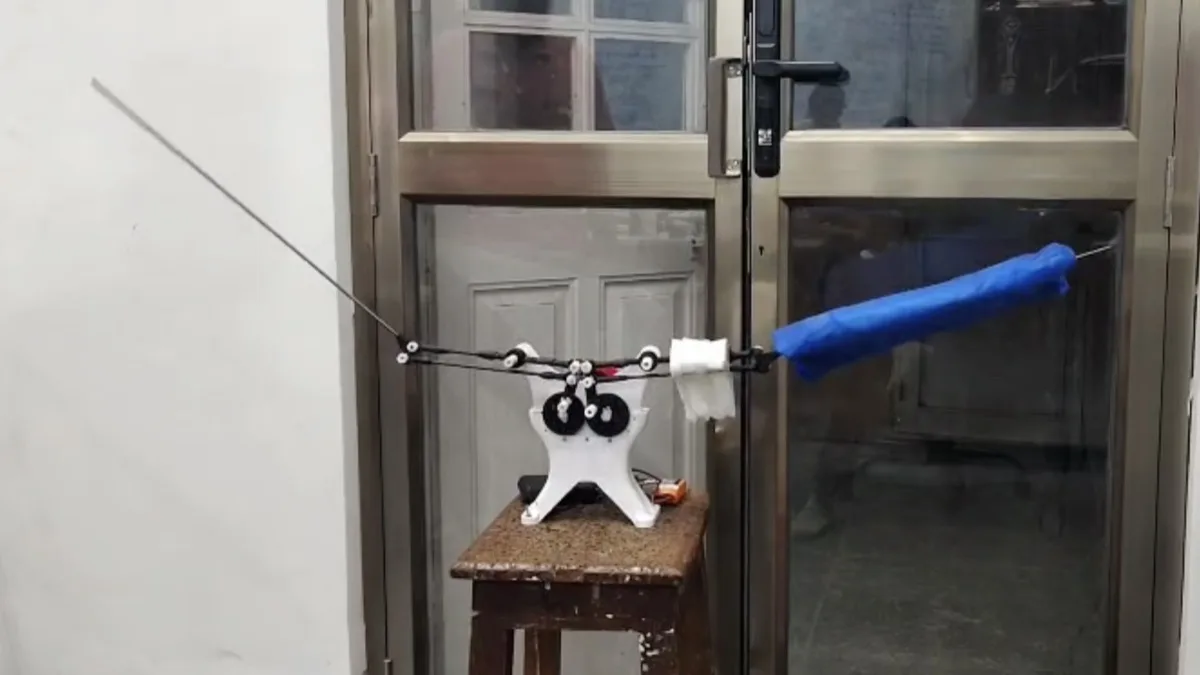
Up next we have RC-Ornithopter
A bio-inspired flying machine that generates both lift and thrust by flapping its wings while balancing aerodynamics and mechanics
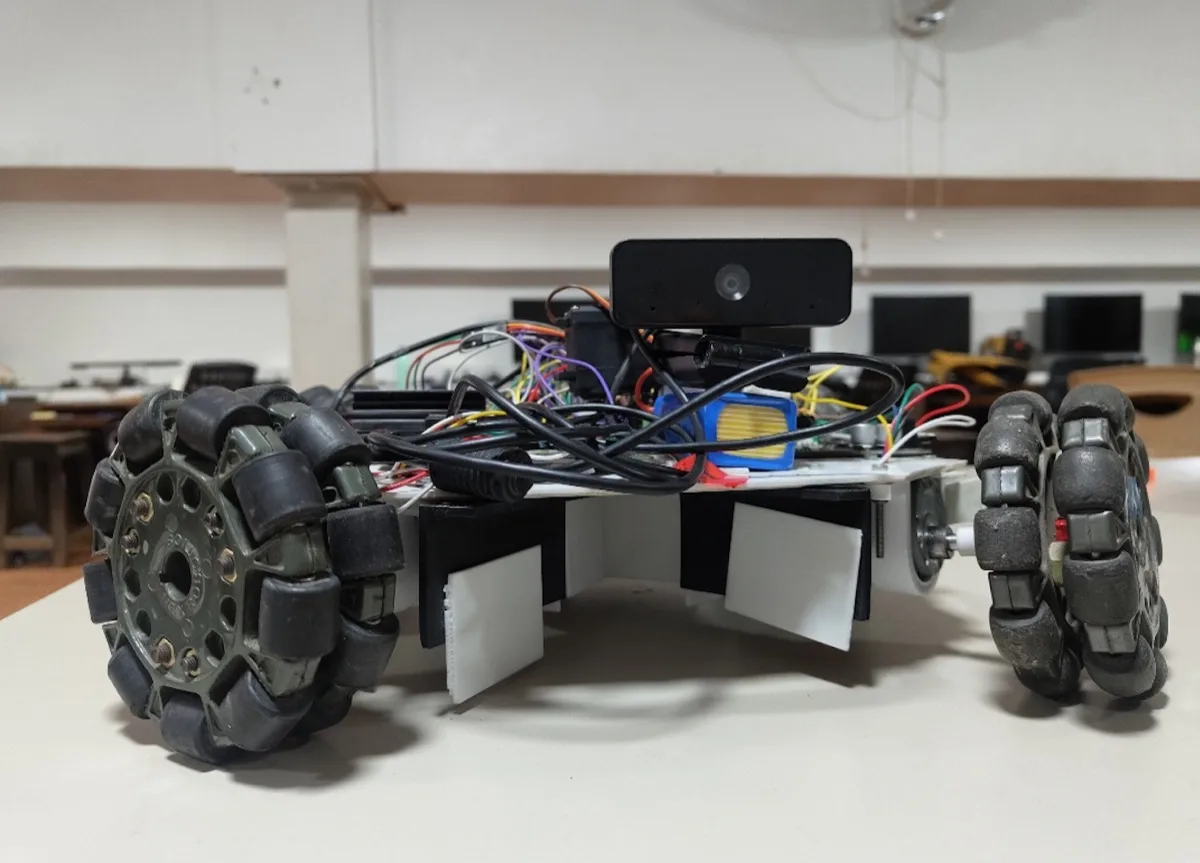
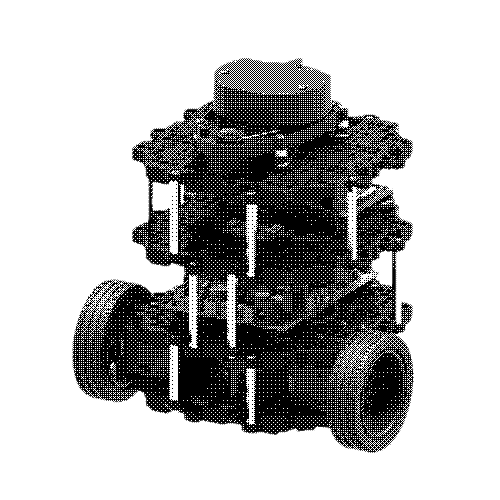
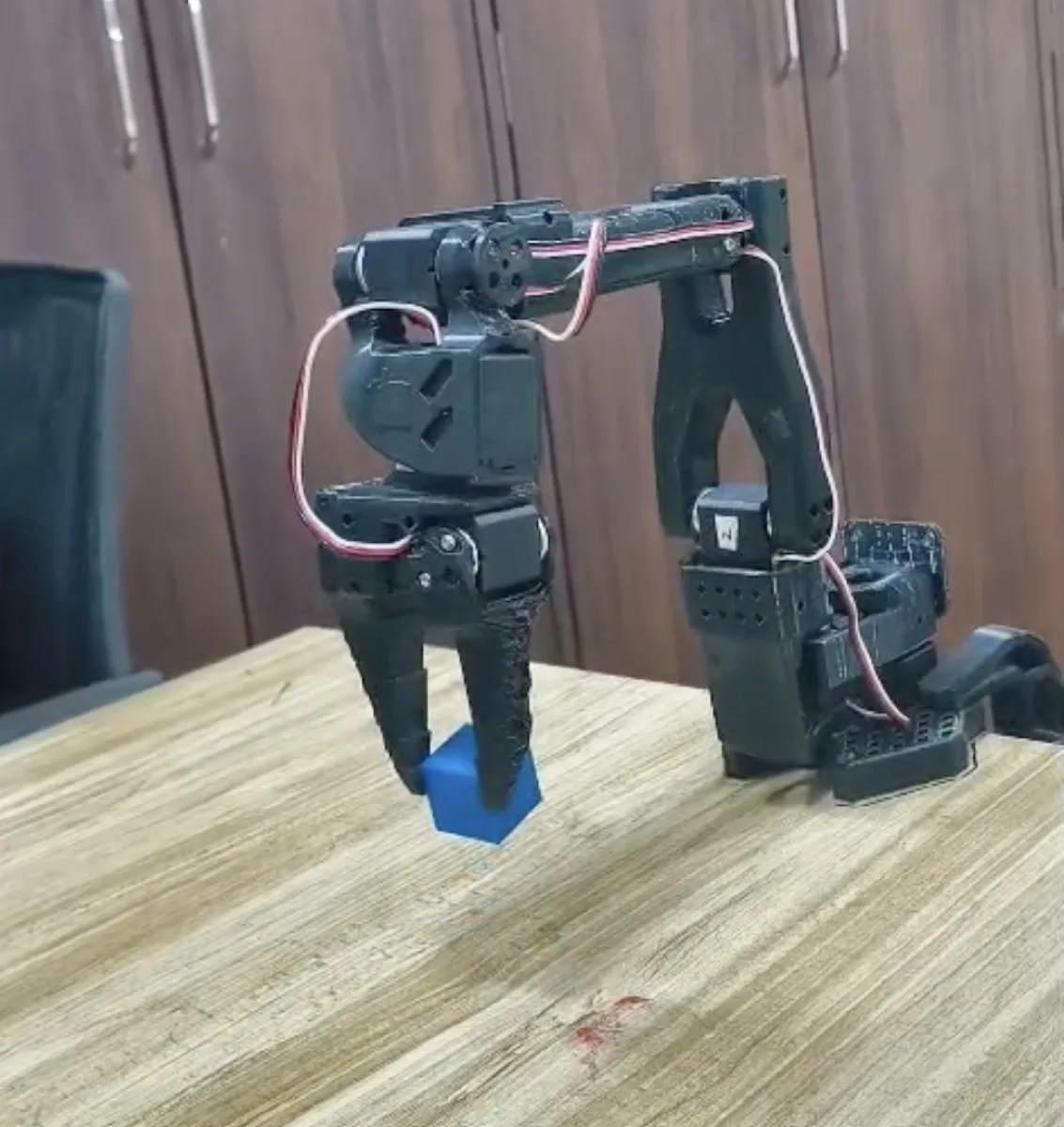
Then comes Ballerina Cappucina
An omnidirectional robot to autonomously glide on the floor and collect coloured balls using OpenCV and ROS
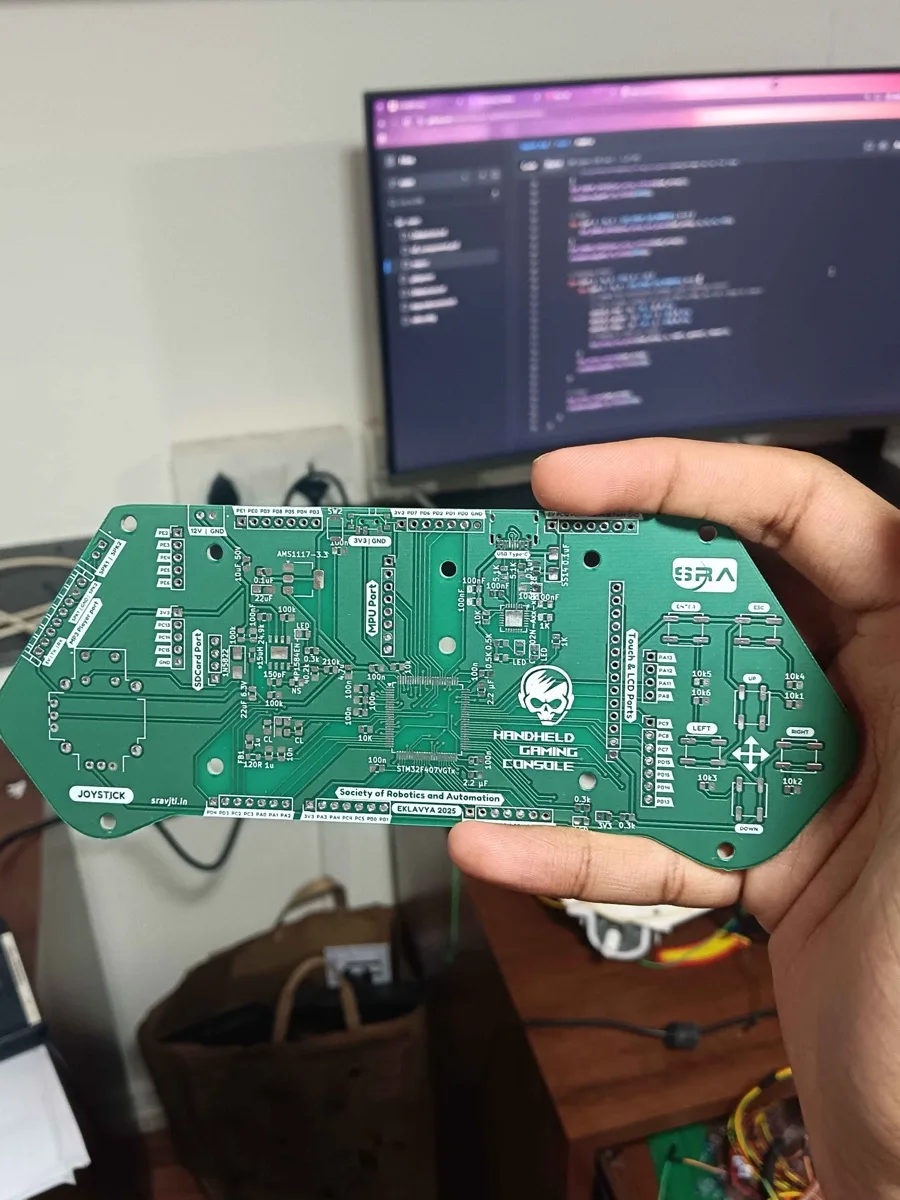
Next up — Handheld Gaming Console
As the name suggests, it's a handheld gaming console based on STM32 with various peripherals like joysticks, IMU and buttons

Then comes FPGA Based Tetris
This project implements the classic game Tetris entirely in hardware on an FPGA
Let's switch up the vibe a bit
In comes Reinforcement Learning
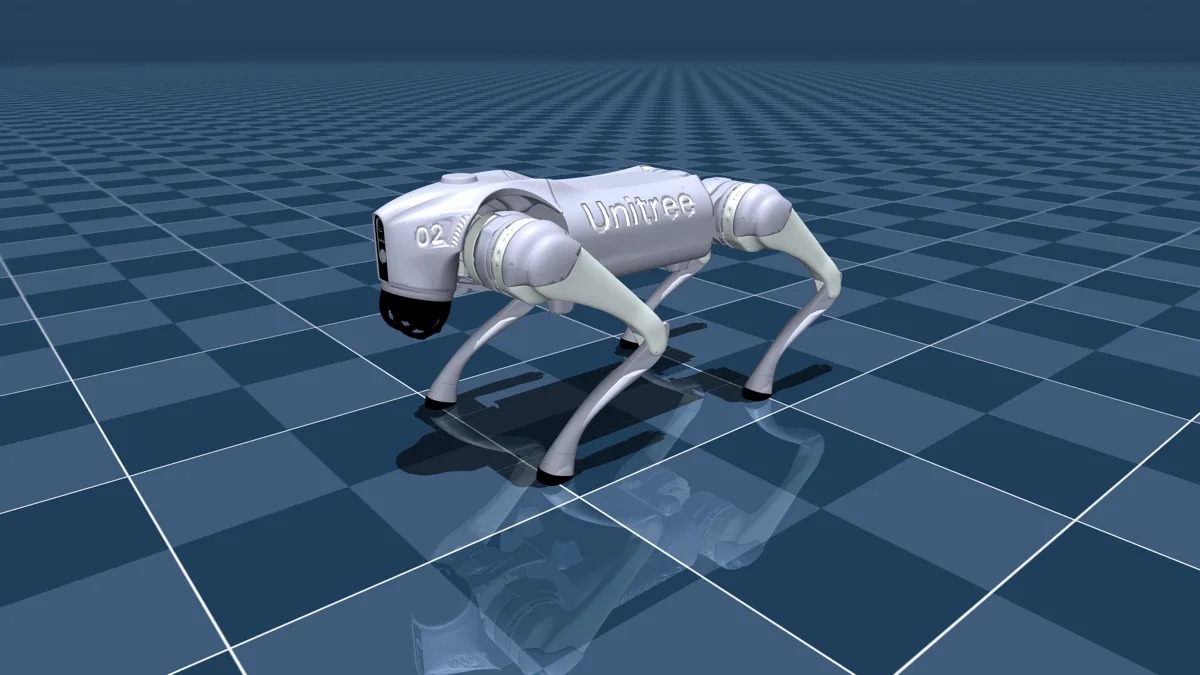
First up is QuadMove
A project focusing on training Unitree's GO2 to walk in MuJoCo using reward engineering
Next is Robot Learning
A project aiming to develop robust robot control policies using reinforcement learning techniques like PPO and FPO
Another one is RubikNet
A project focusing on building a deep reinforcement learning agent capable of solving Rubik's cube
Lastly, we have a few systems-based software projects
Along the same lines we have T5 Grammator
T5 focuses on fine-tuning a transformer model to perform grammar error correction
Next is NovaPi
A lightweight bare-metal operating system for the Raspberry Pi 4B, built from scratch
Then comes the Synapse32
A project on adding cache to a custom RISC-V CPU core, Synapse32
Last up is EchoCore
A project demonstrating real-world application of FPGA for B-mode ultrasound imaging and 16 QAM digital communication
What an insane journey it has been
This is the chance to start yours