| Project Domains | Mentors |
|---|---|
| Robot Learning, Embedded Systems | Tirth Gada, Ashish Nerlekar |
Project Description
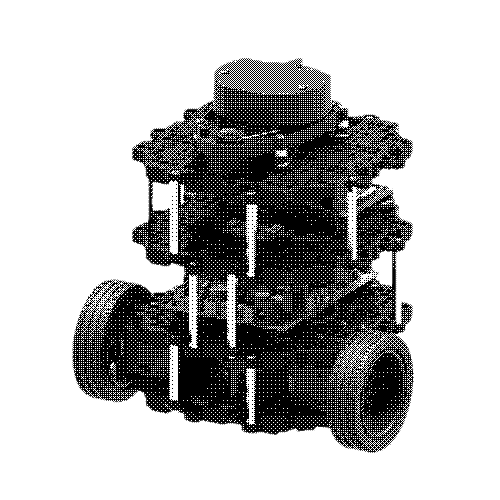
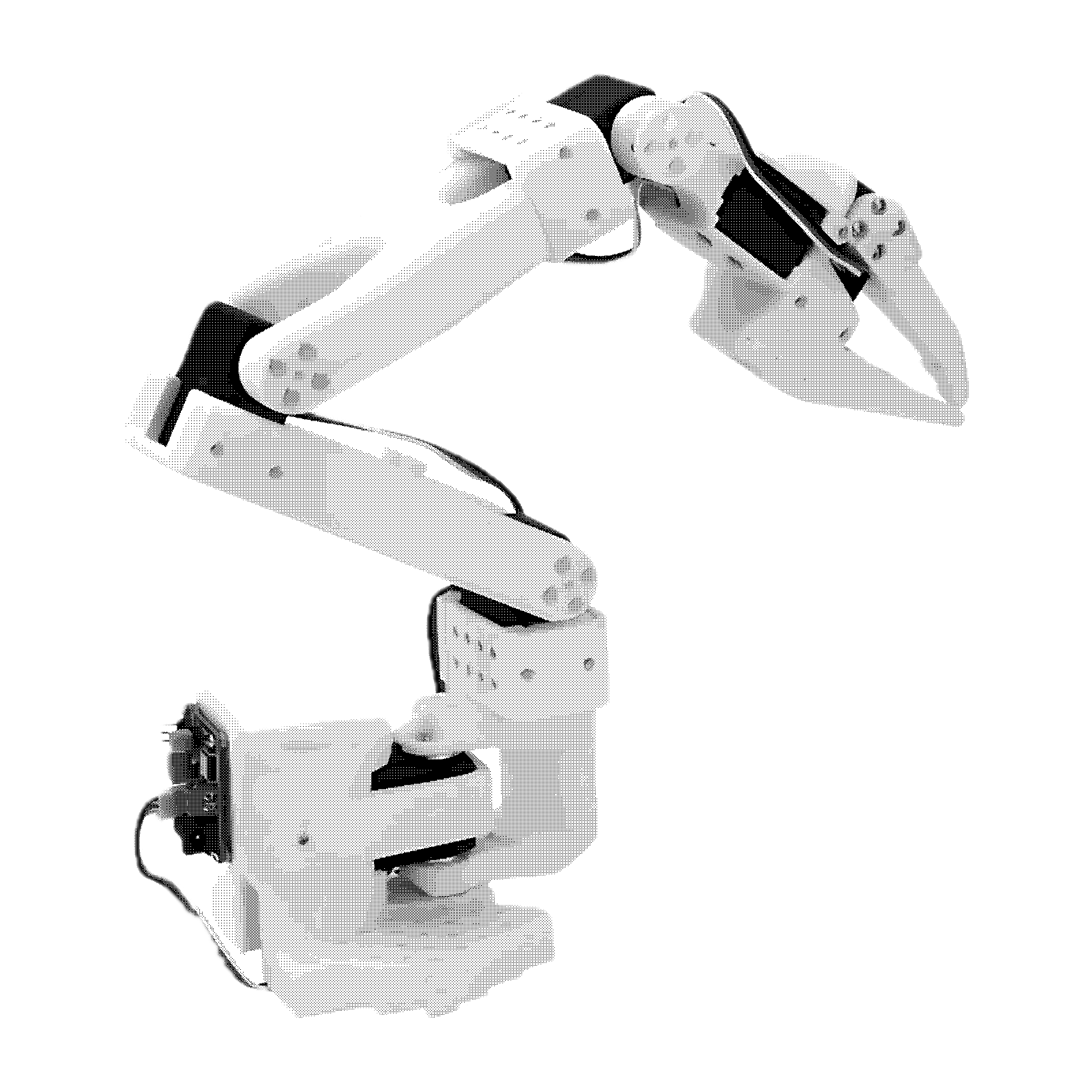
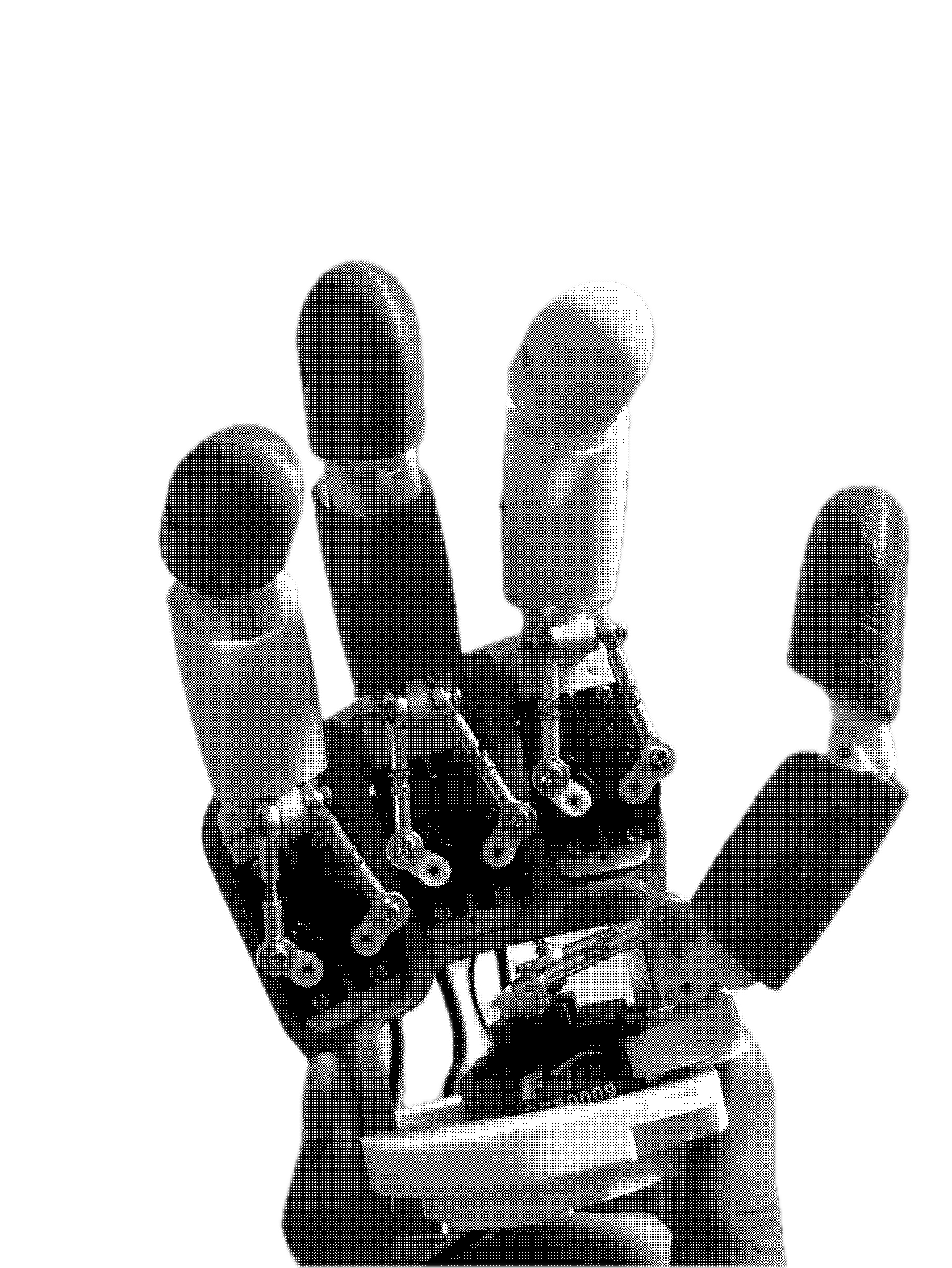
This project focuses on building an end-to-end visuo-tactile pipeline for the SO100 robotic arm system. Students will build low-cost tactile sensors and mount them on the robot arm’s end-effector to accurately sense contact and force during interactions.
This project is a deep dive into the frontiers of robot learning while also getting hands-on experience with designing, testing, and integrating tactile hardware.
The goal is to develop better and more reliable robot learning policies for manipulation and control tasks.